miércoles, 8 de mayo de 2013
miércoles, 17 de abril de 2013
miércoles, 10 de abril de 2013
OTROS ELEMENTOS DE MÁQUINAS
Embragues
Es un elemento de máquinas que se
encarga de transmitir, a voluntad del operario, el movimiento entre dos
ejes alineados. Uno de ellos recibe el movimiento del motor (eje motriz),
y el otro acoplado al eje de salida (eje conducido o resistente),
que transmite el movimiento a los demás órganos. Cuando el embrague produce la
transmisión entre ambos ejes, se dice que está en la posición de embragado.
Por el contrario, si no se transmite el movimiento entre los ejes (cada eje puede
girar a distinta velocidad), se dice que está en la posición desembragado.
Embrague de dientes: En este tipo de engranajes, los árboles que se van a acoplar llevan
en sus extremos dos piezas dentadas que encajan una en la otra.
Embrague hidráulico:


Frenos
Reducen o paran el
movimiento de uno o varios elementos de una máquina cuando es necesario.
La energía
mecánica se convierte en calorífica mediante la fricción entre dos piezas
llamadas frenos. Los frenos más utilizados son los de disco y los de tambor.
Frenos de disco: Se componen
básicamente de un disco, colocado en el eje de giro, y dos piezas o pastillas
fijas que aplican sobre ambas caras del disco para reducir su movimiento.
Frenos de tambor: Constan de una pieza metálica cilíndrica
que gira, denominada tambor, solidaria al árbol (en la rueda del vehículo), y
un conjunto de dos zapatas que actúan sobre el tambor para que roce con él y
producir su frenado.
Elementos de fricción
Las partes de una máquina que poseen
movimiento de rotación necesitan apoyarse en una superficie para girar. Entre
unas y otras se intercalan unos elementos especiales llamados elementos de
fricción.
Hay dos tipos: Cojinetes y rodamientos.
Cojinetes
Es una pieza
o conjunto de piezas donde se apoya y gira el eje de una máquina.
Los cojinetes son piezas fácilmente desmontables que se adaptan entre el
eje y el soporte.
Rodamientos
Los
rodamientos son elementos de fricción formados por dos cilindros concéntricos,
uno fijo al soporte y otro fijo al eje o árbol, entre los que se intercala una
corona de bolas o rodillos, que pueden girar entre ambos, lo cual proporciona
una menor pérdida de energía.
Elementos elásticos
Son
elementos que se encargan de almacenar o acumular una cierta cantidad de
energía mecánica para devolverla en el momento necesario.
Los más
relevantes son:
· Muelles o resortes
· Ballestas
Muelles o resortes
Son
elementos elásticos que se deforman por la acción de una fuerza y que recuperan
su forma inicial cuando cesa la fuerza deformadora.

Ballestas
Son elementos elásticos formados por láminas de acero de distinta
longitud, unidas entre si por medio de abrazaderas.

MECANISMOS DE TRANSFORMACIÓN DEL MOVIMIENTO
Los
mecanismos que hemos considerado hasta ahora no modifican el tipo de
movimiento; es decir, “transforman” movimientos rectilíneos en movimientos
rectilíneos, o movimientos de rotación en otros movimientos de rotación.
Sin embargo, en los mecanismos que vamos
a describir en este apartado el movimiento de entrada es diferente al
movimiento de salida.
Mecanismos
que transforman movimientos de rotación en movimientos rectilíneos.
Piñón-cremallera
Este sistema transforma
el movimiento circular en rectilíneo por medio de dos elementos dentados:
Un piñón que gira sobre su propio eje y una barra dentada denominada
cremallera. Los dientes pueden ser rectos o helicoidales.

Taladradora de columna:
El conjunto piñón-cremallera lo componen la manivela de mando, que lleva
en un extremo un piñón, y el eje portabrocas, que lleva tallada la cremallera.

Caja de dirección
de un automóvil: El piñón
está solidario a la barra de dirección y al volante, y los extremos de la
cremallera se encargan de orientar las ruedas.
La cremallera puede considerarse como una rueda dentada de radio
infinito, cuyo módulo debe coincidir con el del piñón.

Mecanismos que transforman movimientos de rotación en movimientos
alternativos.
Mecanismo biela-manivela
Este
mecanismo consta de dos piezas básicas articuladas entre sí y de las que recibe
el nombre: la manivela y la biela
La manivela
OB es una pieza que gira alrededor de un punto O y describe un movimiento
circular.
La biela AB es una pieza rígida acoplada
a la manivela en el punto B. este extremo, denominado cabeza de la biela, sigue
el mismo movimiento circular que la manivela, mientras el otro extremo A,
denominado pie de biela, describe un movimiento alternativo o de vaivén. Las
bielas constan de tres partes:

Habitualmente, la manivela actúa como elemento
motriz y la biela, como elemento conducido. De este modo podemos transformar
movimientos circulares en movimientos alternativos.
Cigüeñal y biela
El cigüeñal
es un elemento que, junto a la biela, transforma el movimiento circular en
alternativo o viceversa.

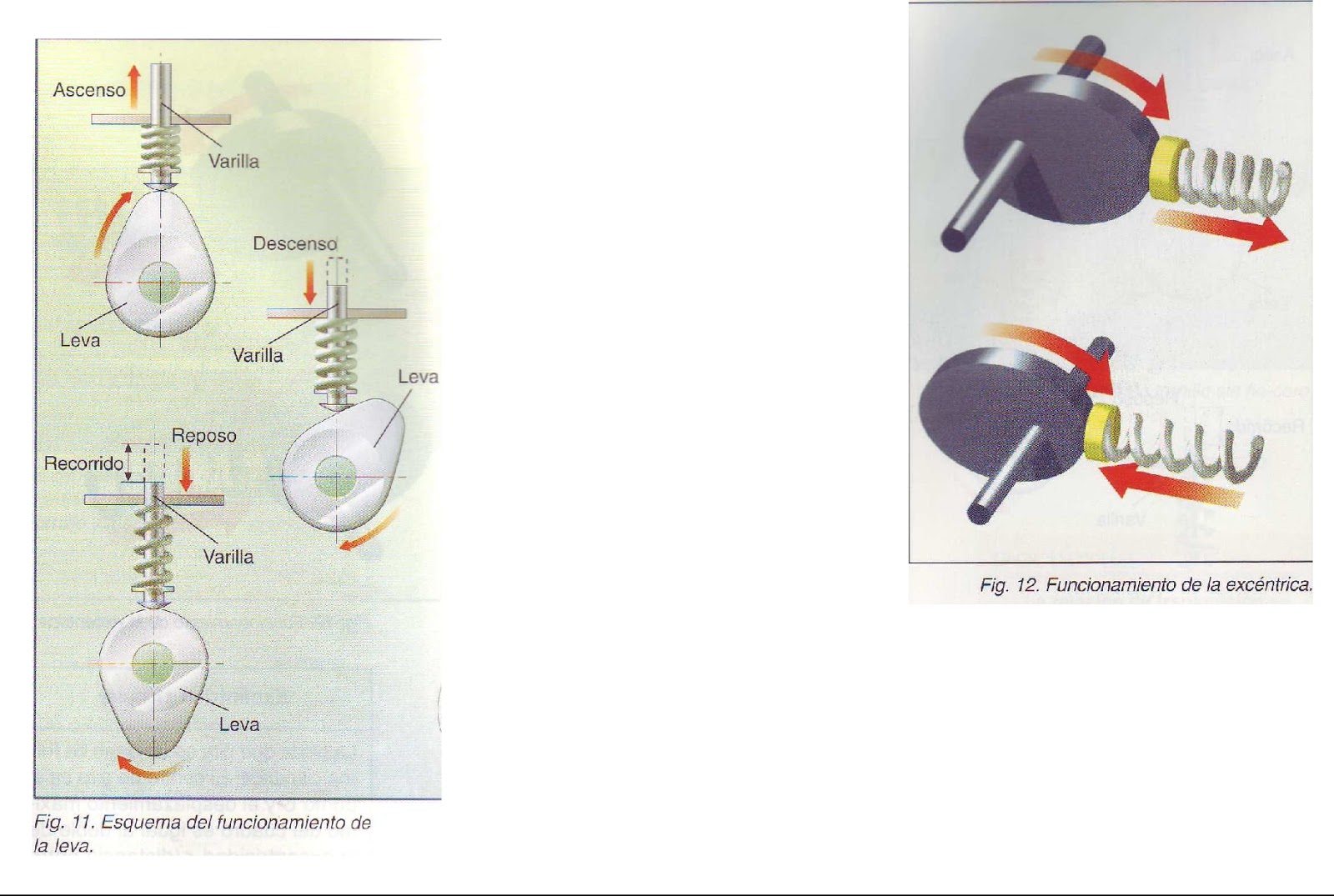
Leva y excéntrica
La leva es un disco de forma irregular
sobre el que se apoya un elemento móvil denominado varilla, seguidor o vástago.
Ambos elementos deben estar permanentemente en contacto.
Cuando el disco gira, su movimiento
circular se transforma en movimiento alternativo de la varilla, el que se
intercalan períodos de reposo. La diferencia entre el punto más alto del
recorrido del vástago y el más bajo recibe el nombre de carrera de la leva. El
perfil del disco determina el tipo de movimiento de la leva.
La excéntrica consiste básicamente en una pieza de forma geométrica
diversa en la que el eje de giro no coincide con su eje geométrico. La
distancia entre ambos ejes se denomina excentricidad.
Cuando se
sitúa una pieza rectilínea llamada vástago en contacto con la excéntrica, el
movimiento circular de ésta se convierte en movimiento alternativo del vástago.
La excéntrica más sencilla que se puede encontrar tiene forma de disco
circular.
TRANSMISIÓN ENTRE EJES
Transmisión entre ejes perpendiculares
Transmisión
entre ejes que se cortan
Los
engranajes suelen ser:
·
De dientes rectos:
engranajes cónicos.
·
De dientes
helicoidales: engranajes cónicos helicoidales.
Ambos tipos tienen las superficies
primitivas troncocónicas. Esta transmisión permite transferir esfuerzos
importantes pero, al mismo tiempo, se generan grandes fuerzas axiales.

Transmisión
entre ejes que se cruzan
Existen dos
formas básicas
Tornillo sinfín y
rueda cóncava: Tiene la ventaja
de que solamente se puede transmitir el movimiento del
tornillo a la rueda cóncava (corona) y nunca al revés, lo que
permite que se pueda utilizar en aplicaciones en las que una vez que el
motor se ha parado, no sea arrastrado por el propio peso.
Permite la transmisión de esfuerzos
muy grandes y a la vez tiene una relación de transmisión muy baja.
El mecanismo consta de una rueda
conducida dentada, y un tornillo, que es la rueda motriz.
Ejemplo de ello pueden ser los tornos
para sacar agua o subir materiales, ascensores, etc.

La relación de transmisión es:
1
|
|
I
|
= ------
|
Z
|
|
Engranajes
helicoidales
Relación de
transmisión: Llamamos Z1 al número
de dientes del engranaje de entrada o engranaje motriz, Z2 al número de dientes del engranaje de salida o engranaje conducido.
La relación de transmisión será:
V2
|
Z1
|
I = -------
|
=
-----
|
V1
|
Z2
|
En definitiva, la relación de transmisión
es igual al cociente entre el número de dientes de la rueda motriz y el número
de dientes de la rueda conducida.
La relación
de transmisión también se puede hallar en función del diámetro primitivo de la
ruedas. Llamamos dp1 al diámetro
primitivo de la rueda de entrada y dp2 al diámetro primitivo de la rueda de salida.
V2
|
dp1
|
I = ------
|
=
-----
|
V1
|
dp2
|
NOTA: Para que
dos engranajes puedan engranar entre sí es necesario que tengan el mismo módulo.
Momentos torsores
Cuando una fuerza actúa sobre un cuerpo
capaz de girar sobre un eje, produce un movimiento de rotación o giro. La
magnitud que mide la intensidad del giro se denomina momento torsor (es algo
así como la intensidad o potencia del empuje que hace girar el cuerpo).
Si la fuerza F que actúa es perpendicular
al radio de giro R en el punto donde se ejerce, el momento torsor, M ,se
calcula como el producto de ambas magnitudes
M = F · R
Cuanto mayor sea la fuerza ejercida o la
distancia el eje de giro, mayor será el momento torsor transmitido.
NOTA: Al momento torsor
también se le denomina par de fuerzas o par motor.
La relación de transmisión es igual al
cociente entre el momento torsor que resulta en la rueda motriz (M1) y el que se aplica en la rueda conducida (M2).
En
consecuencia, la relación de transmisión se puede poner también como.
M1
|
|
I
|
= ---------
|
M2
|
Tren
compuesto de engranajes
Si
disponemos dos o más árboles provistos de diversas ruedas dentadas de modo que
al menos dos de ellas giran solidariamente sobre el mismo árbol, obtenemos un
tren compuesto de engranajes.

El tren compuesto que aparece en la figura está formado por dos
engranajes simples, el formado por las ruedas 1 y 2, y el que forman las ruedas
3 y 4.
Suponiendo el árbol M como el árbol
motriz. Sobre él va montada la rueda 1, que actúa como conductora de la rueda
2.
El árbol I es un árbol intermedio. Sobre el que se monta la rueda 2
–conducida-, que recibe el movimiento de la 1, y la rueda 3, que actúa de
conductora y transmite el movimiento a la rueda 4.
El árbol R
es el árbol resistente.
La rueda 4 –conducida- recibe el
movimiento que transmite la rueda 3.
El cálculo
de la relación de transmisión es idéntico al del sistema de poleas compuesto.
Caja de velocidades
Cuando las ruedas dentadas pueden
desplazarse a lo largo de los ejes para formar diferentes engranajes simples,
se consigue que varíe la velocidad final en el árbol de salida manteniendo
constante la velocidad del árbol motor.
Este dispositivo se conoce con el nombre
de caja de velocidades y se utiliza en vehículos y máquinas de herramientas.
Tornillo sin fin

Es una pieza cilíndrica que dispone de
uno o varios filetes arrollados de forma helicoidal.
Se suele utilizar dentro el conjunto
tornillo sin fin – corona.
La corona
es una rueda dentada de dientes helicoidales cuyo ángulo de inclinación
coincide con el de los filetes del tornillo sin fin.
Transmite
el movimiento de rotación entre dos ejes perpendiculares, de manera que el
tornillo sin fin actúa siempre como elemento motor y la corona, como elemento
conducido.
Se consigue una drástica reducción del
movimiento y como consecuencia un notable aumento del momento resultante.
Junta Cardan
Se usa para transmitir un movimiento de
rotación entre dos ejes que pueden estar alineados o formando un ángulo entre
ellos.
Permite transmitir el giro entre dos ejes
que no son paralelos y cuya orientación relativa puede cambiar a lo largo del
movimiento.
Si se pretende comunicar el giro entre
dos ejes que formen un ángulo relativamente grande (mayor que 20º), se utilizan
dos juntas en serie.

Consta de
una cruz formada por dos brazos perpendiculares.
En cada uno de los brazos se
articula una horquilla fija en los extremos de cada eje. La cruz puede moverse
en las uniones con las horquillas.
La velocidad de giro de ambos ejes es la misma, por lo que la relación
de transmisión es 1.
Poleas con
correa
Este tipo
de transmisión está basado en la polea, y se utiliza cuando la distancia
entre los dos ejes de rotación es grande. El mecanismo consiste en
dos poleas que están unidas por una misma correa o por un mismo cable, y su
objetivo es transmitir el movimiento del eje de una de las poleas al de la otra.
Ambas
poleas giran solidarias al eje y arrastran a la correa por adherencia entre
ambas. La correa, a su vez, arrastra y hace girar la otra polea (polea
conducida o de salida), transmitiéndose así el movimiento.
Al igual
que en el caso de las ruedas de fricción, el número de revoluciones (o vueltas)
de cada eje vendrá dado por el tamaño de las poleas, de modo que, la polea
mayor girará a una velocidad más baja que la polea menor.
Basándonos
en esta idea, podemos encontrar dos casos básicos:
·
La polea de salida
(conducida) gira a menor velocidad que la polea de entrada (motriz). Este es un
sistema de poleas reductor de velocidad.
·
La polea de salida
gira a mayor velocidad que la polea de entrada. Este es un sistema de poleas multiplicador
de velocidad.
|
|
n2
|
D1
|
|
i
|
= -----
|
= -----
|
|
|
n1
|
D2
|
|
|
|
|
n2 es la velocidad de
la rueda conducida n1 es la velocidad de la rueda motriz
D1 : el diámetro de la rueda motriz
D2 :
el diámetro de la rueda conducida
Suscribirse a:
Comentarios (Atom)